Home
Portfolio
Resume
Portfolio
All
Software
Robotics
Modeling
Ros
Kalman Filter Localization
4DOF Robotic arm from scratch
Linear Control Theory MagLev
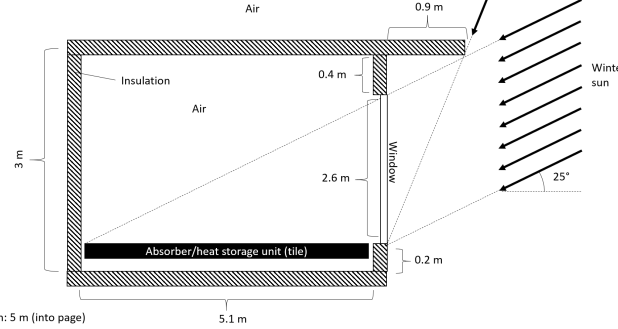
Designing a Passive Solar House
Linear Control Theory Segaway
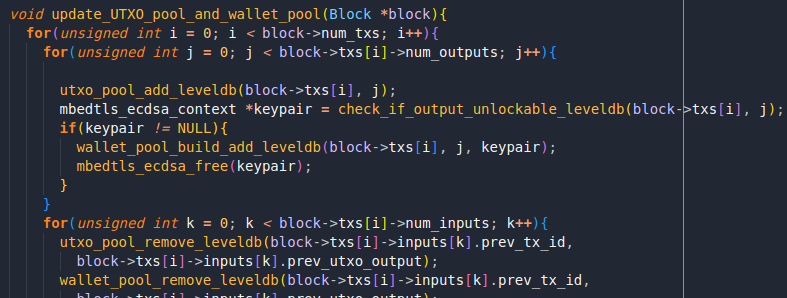
OlinCoin: a pure C implementation of Bitcoin
OlinMaps™
Robotic LIDAR nav w/Gradient Descent
ROS Dodgeball Machine Learning
ROS Gesture Control Navigation (ML)
ROS Gesture Control Navigation (ML)
ROS Particle Filter Localization
Soft Robotic 3-DOF Finger
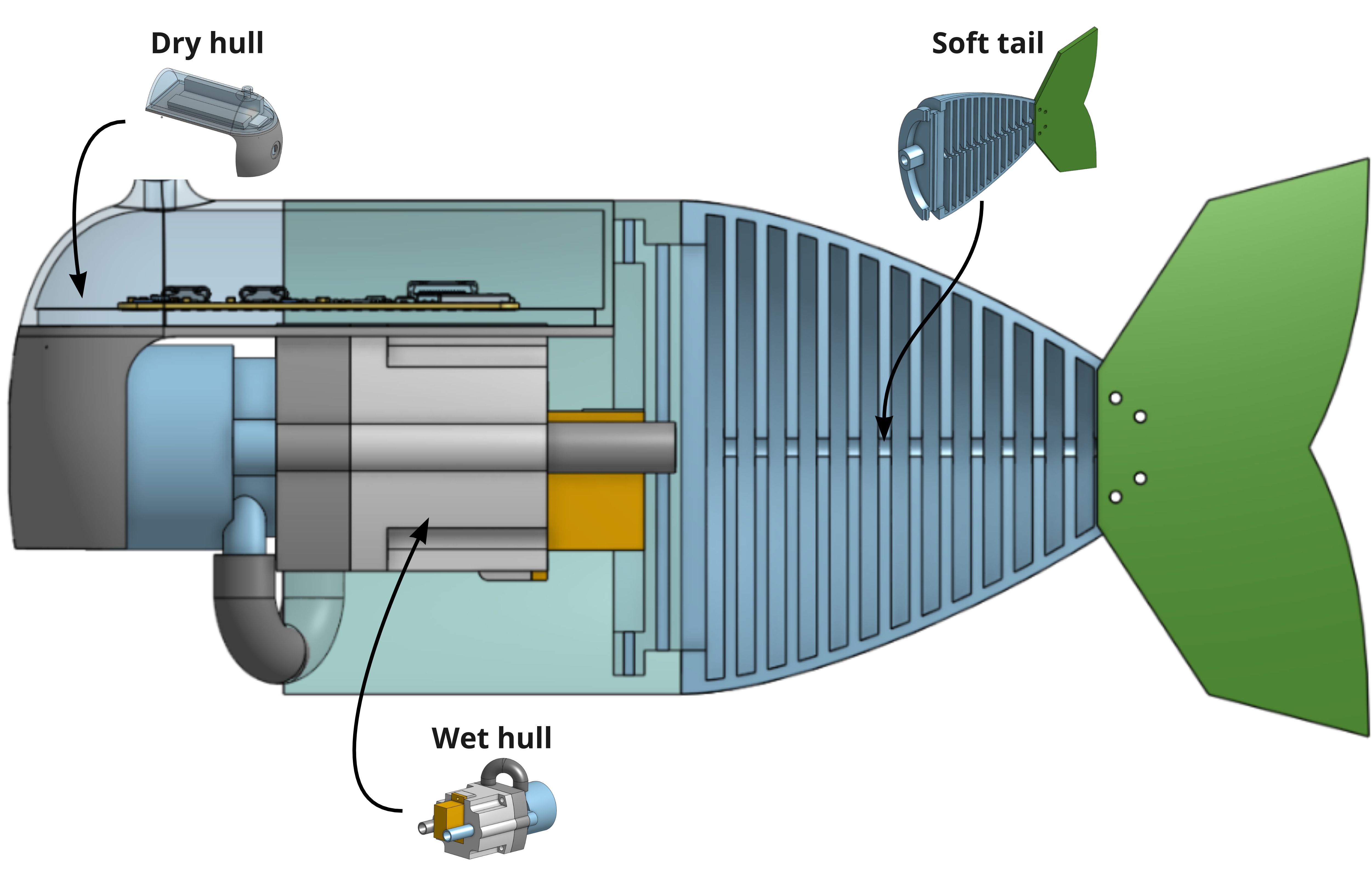
Soft/Hard RoboFish